When the decision was made to build the last racer, the first 3 thoughts went through my head:
- This is going to be a lot of work.
- This is going to be a lot of fun to ride.
- This is going to generate a lot of stupid comments.
1) It was. And it was worth it!
2) It was. More fun than anybody else knows!!
3) Far less than I expected in the real world - virtually none, really!!!
But then there's the internet:
- It's just the Akira bike!
- It's just a Gurney Alligator!
- It's just a two wheeled car!
- It's just a scooter!
- It's just a Quasar!
- You'll die if you crash or run into something!
- All those ball joints and rods kill steering feel!
- Can't see where you're going on the track!
- Can't steer properly if you can't move your body!
- Can't stand on the pegs while riding over bumps!
- Why don't I see them racing in GP or the IoM TT?
- Low CG motorcycles are hard to balance!
- Low CG motorcycles are hard to countersteer!
- Driving a steered wheel requires negative trail!
- Two wheel steering is pointless and stupid!
- There's no rake at the front end!
- It needs streamlined bodywork!
- If it was a good idea, (Fanboi Brand) would be doing it already!
- (Insert vapid cliché here.)
- It's too low for traffic!
- Where's my lady supposed to sit?
- It looks hard to put your feet down at stop signs!
- That riding position is no good!
- Too many parts!
- They're supposed to be simple!
- Why won't you do it my way?
- Send me the drawings of your latest project.
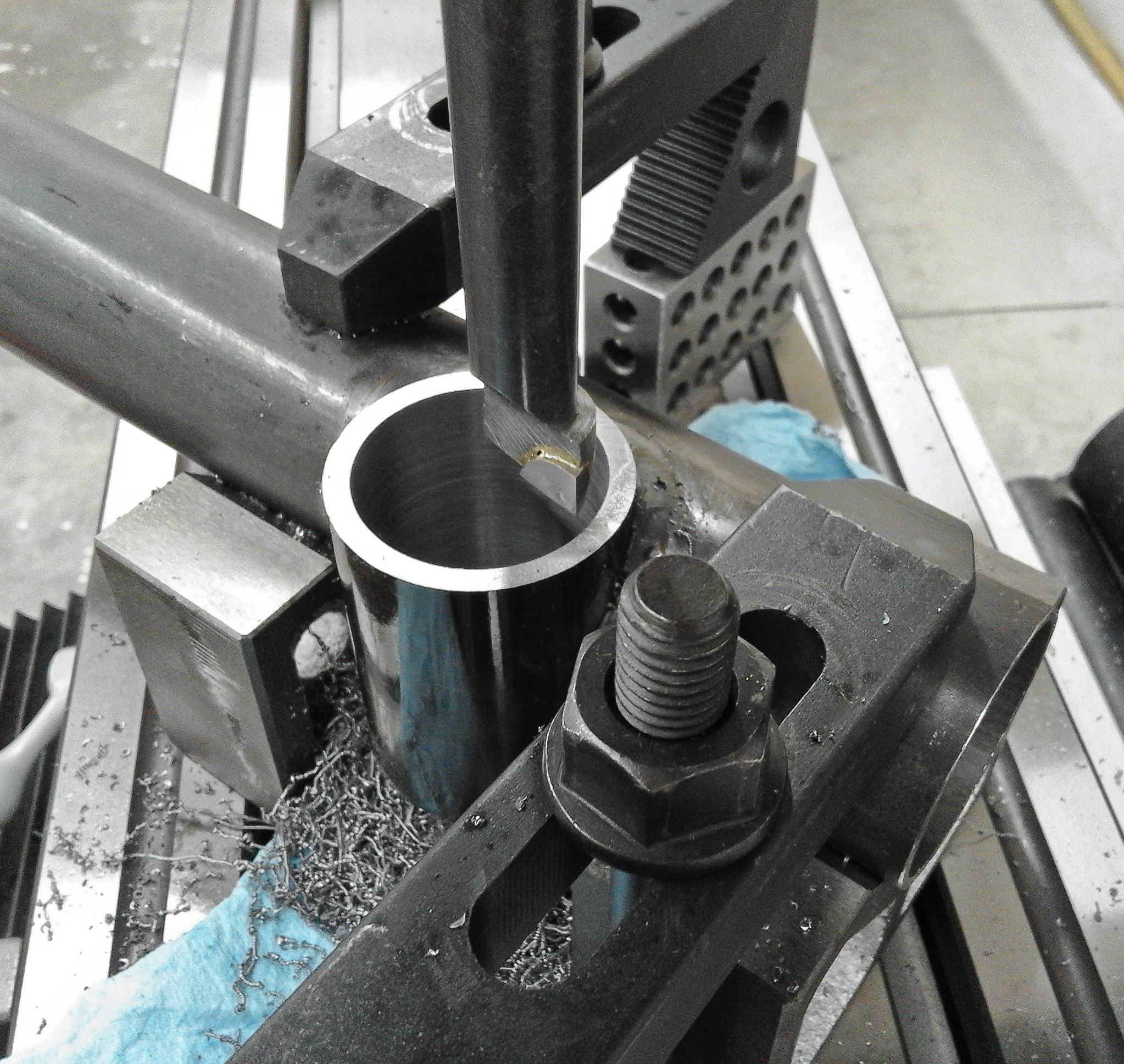
1) OK - Akira references really are fun! A friend made me really cool race team logo from "Bartkira" many years ago. I had a bit of fun composing an Akira poster parody photo shoot using a forklift in an industrial park back in 2016.
The movie bike is wonderful art for fictional anime/manga, but, sadly, terrible design for the real world. But unlike the dragged out for decades Akira "Projects", my previous racer was finished, tested, raced, and it worked.
No, Mr. Otomo did not invent the recumbent motorcycle. See also: #5, below.
2) Considering the liquid cooled twin cylinder engine, 2 wheel steering, no steering head, virtual hub center steering front suspension, remote mount handlebar, and reclined seat and rider position, there are more differences than similarities. That said, comparisons are understandable; the 'Gator was the only recumbent motorcycle to get any decent coverage in this country from the
legacy motorcycle media this century.
No, Mr. Gurney did not invent the recumbent motorcycle. See also: #5, below.
3) I'm really happy to hear it isn't just another outdated two wheeled horse.
While a bicycle with an engine is understood to be a "Motorcycle", a
recumbent bicycle with an engine is somehow a "Car":
See also: #5, below.
4) If you can't tell the difference between a recumbent motorcycle and a scooter, then clearly this subject matter is way beyond your comprehension.
See also: #5, below.
5) That comes from idiots that know too little yet talk too much and/or sociopaths with cognitive disorders posting their minimization tendencies on the internet. Difficult to discern, as the results are the same: The phrase "It's just a ...." consistently precedes stupid comments, regardless of subject matter.
No, Mr. Newell did not invent the recumbent motorcycle.
6) Crashed at medium speed early 2013 - crashed at high speed later 2014 - didn't die either time, as far as I can remember. Still have the helmet from both crashes - not a scratch on it. If you are colliding with stationary objects at the track, well, you don't belong out there.

Yeah,
crumplezone face (Go ahead - click on that - I dare you) is far more desirable.
7) No, they do not. Or at least they don't if Teflon lined rod ends are kept out of the system. Even quite a bit of play is better than a little bit of binding - the play will only be noticeable when parked - while cornering, there is a load on the handlebars (That's where feedback comes from!) taking up any play that might exist, leaving that crucial front end feel completely intact.
Front end feel comes from changes in the steering load - a little change means a lot. NOTHING kills that feel more than having the rider's weight on the handlebars while trail braking. With a recumbent motorcycle, the handlebars are just that - bars for the hands - the level of feedback from the front end is amazing if there is enough trail to provide it. Hub center steered front ends often need less trail for stability, which also makes the steering lighter, but that also reduces front end feel - something too often blamed on "All those linkages".
Another change in perception comes from the effects of stiction - a binding telescopic fork (There is no other kind) feels rigid and "Transmits" feedback very clearly. A binding suspension also loses traction very easily. What too many perceive as "Signal" from the front end is actually "Noise". It is too easy to confuse the absence of noise with a loss of signal; the lowest level signals were lost under a high noise threshold all along. Confidence in the front end shouldn't come from noise, but apparently, it does.
Speaking of feel: Nothing else provides a better level of feedback than a riding position that spans the wheelbase - any change in traction and/or yaw shift is immediately felt.
No, you won't read or hear any of that from the moto-infotainment outlets. They have no experience with the subject, nor do they want any.
8) Yes, my line of sight while riding straight and level is quite a bit lower than usual - yes, that changes one's perspective quite a bit - one gets over it very quickly with some seat time. But when leaned over, my line of sight is no lower than usual - look at how high the rider's helmet is from the track when he's dragging his elbows. If you ever need to sit up higher to see where you're going on the track, again, you don't belong out there.
If you really want to find out how effective "Body english" is for stabilizing a bike, run a pin through the steering head of a bicycle so it can't steer. Now hop on it and ride it using all of that body english that "Worked" before.
Didn't work, did it?
10) Adequate suspension works far better than standing on the pegs - or at least it does on paved racetracks. That reclined seat and rider position makes tailbone impacts nearly impossible anyway.
Look at the driver's position of a modern F1 car - now compare it to mine. Ever see an F1 driver stand up for a bump? Ever see anyone in any 4 wheeled vehicle with seat backs (Including race karts) stand up for a bump? Are motorcyclists really that stupid about what suspensions do and how real seats (As opposed to saddles) work? The answer to that, it seems, is both obvious and pathetic.
That leaves USA club racing and track days - I'm more than happy with that.
12) Motorcycles, at operating speed, are not balanced by the rider - they don't fall down on their own. There are plenty of videos out there of riderless roadracing motorcycles rolling right along without anybody balancing them. Sure, at low speeds, such as waiting in line for tech, stopping at the grid, or heading back to your pit, the rider has to balance the bike. But at operating speed, a single track vehicle is a dynamically stabilized system, NOT an "Inverted pendulum" or static unstable object like a short broom handle. Static unstable objects like a short broom handle can fall in any direction - a single track vehicle can only fall in one of two directions.
Back in 2005, I still wasn't sure that a recumbent motorcycle with a low and laid back seat would be a viable road racing vehicle - could the rider effectively operate the bike in a competitive environment? Finding the answer seemed like a wise idea before building a 2WS racer. So I modified a stand-up gas scooter and took it to the kart track in Calhan.
Steering was perfectly calm and predictable to the point of easily dragging the seat at a 42 degree lean angle. At least a dozen others rode it - ages ranging from pre-teen to middle aged - they all had a blast on it. It would go just over 40 mph on level ground. Mission accomplished: It was restored back to its original configuration and sold so I could build a 2WS scooter based mini-moto racer. In 2006, I did - with an even lower seat:

It was even easier to steer and balance.
No such thing as "Too low" for stability and control. S
ufficient lean angle clearance is another matter. Weight transfer IS NOT an issue for a long wheelbase 2 wheel drive/2 wheel steering motorcycle.
13) One of the most idiotic misconceptions I hear about single track vehicle dynamics is that, if the CG is low enough, the side force from countersteering moves the CG sideways instead of rolling it. That is impossible - inertial physics isn't affected by scale. The closer the CG (And roll axis) is to the contact patch, the less it has to move to attain and maintain any given lean angle.
What DOES negatively affect countersteering is a high polar moment about the roll axis: The greater the distance between heavy components, (Rider, engine, full fuel tank, battery, etc...) and the contact patch, the slower the roll response. That's where a recumbent configuration excels - the distance from the roll axis of those component CGs can be a LOT less than a conventional configuration. That's also why the rider does not need to move around the bike: the rider's CG isn't otherwise having a massive effect on weight transfer. Mass centralization is a good thing - it's even better when it includes the biggest mass of all: The rider.
Physics says so. Testing says so. Social media's loud-mouthed dumb kids will still say otherwise...
14) No, it does not. A driven wheel does not behave through the trail moment arm the same way a braked wheel does. Why? Simple: The driving force is always inline with the trail moment - NO side force applied - any stabilizing side forces otherwise acting on the trail moment have the same effect regardless of the driving force. Physics says so. Testing says so. Yet the Facebook pseudointellectuals "Know" otherwise...
15) 2WS has been extensively tested here, but you'll never know it if you only read the legacy motorcycle media. The quality of the consumer comments says a lot about the quality of information they're given to consume:
MORE intellectualized ignorance about 2WS from the Facebook moto-gossipers!:
What a profound declaration of intellectualized ignorance:
Just lots of words saying that they have no knowledge of what 2WS does...
Discover something through research in the real world! Earn opposition from moto-gossipers! Here's your meme:
16) That comes up a LOT - easy to understand why - it sure looks that way! But the steering axis runs down through the upright's top ball joint (Obvious) to a virtual pivot point 1.7" ahead of the front axle (Not obvious) at a 12 degree angle, with just over 4" of trail. That geometry works perfectly well on this machine - NO weird behavior at any speed or lean angle. A far higher level of pitch stability tolerates much faster steering geometry than normal. And with remote steering, ergonomics doesn't dictate steering geometry anymore.
17)
Yes, indeed it does. Beautiful and effective bodywork would be
wonderful! But if I can go fast and have fun on a motorcycle
without extensive bodywork, then I'm not sufficiently motivated to do that much more work. The next racer will have as little bodywork as I can get away with: Seat, tank, belly pan, number plates, airbox, and . . . nothing else.
18) Brand supremacists are both annoying and stupid.
19) If you want to prove that you can't compose an intelligent thought, just stay on the couch and post one or more of these:
- Just because you can doesn't mean you should!
- A solution looking for a problem!
- An answer to a question nobody asked!
- Incumbent [sic]!
- Reticulated [sic]!
- It's been done before!
- Nothing new!
- Death trap!
- Fugly!
Stupidity and illiteracy are a natural fit:
Stupidity and illiteracy and FUD are an even better fit:
Help yourself to the passive-aggressive word salad bar:
Go back for another helping:
20-22) Irrelevant on a race bike - ought to be obvious, really.
23) Roadracing motorcycles are the only high-performance motorized vehicles that don't use that position. Or at least not yet. Land speed record motorcycle racers have been using that position for well over half a century. Air racers and formula car racers operate in that position just fine. That position is safer, faster, and vastly more comfortable than the archaic horseback riding position.
24) Every single performance breakthrough since the bicycle was complicated with the installation of an engine has increased weight, cost, and whining from the elderly. The elderly die off and breakthroughs live on. There's potential for a lot more performance.
Then there's another idiotic misconception: Parts = failure points. A single inadequately designed and/or fabricated part can fail in numerous modes and misapplications. Adequately designed and fabricated parts won't fail - parts count is irrelevant.
FUD mongers often whine about the number of rod ends I use but never count the number of roller or ball bearings used in a "Simple" conventional steering head. Aren't all of those heavily loaded tiny bearing elements also "Failure points and unnecessary complication"?
25) They're supposed to be faster and, therefore, more fun. Simpler is seldom faster. Slower isn't more fun.
26) Here's your opportunity: Build and race it yourself! Prove what a visionary you are!
Didn't think so: Opportunity is too much work and costs way too much time and money.
27) No!
I will not publish/share unfinished/untested project drawings. There is no opening for the "Creative director" position here (That could fill another column, but I would rather post about fun with real world motorcycle dynamics research).
5th image: Screenshot from http://npbka.com/morbidelli-project.htm
















-2.jpg)











.jpg)


.jpg)


.jpg)